
6.1 AI Applications - Minimax Algorithm¶
Author: John Rieffel, Union College
To Cite:
Rieffel, John. “AI Applications - Minimax Algorithm”. PDC for Beginners, edited by CSinParallel. 2022. Available Online. https://doi.org/10.55682/AOPD4880
6.1.0 Introduction¶
In many ways, the progress of Artificial Intelligence research can be measured through the history of human-competitive game play. In 1994, an AI called “Chinook” defeated checkers champion Marion Tinsley. In 1997, IBM’s Deep Blue defeated Gary Kasparov in a six-game match. In 2017, AlphaGo defeated Ke Jie, the world’s top-ranked Go player, earning the rank of 9 dan.
At the heart of these AI milestones is a simple algorithm called Minimax that dates back to John von Neumann (1928), although Claude Shannon (1950) is often given credit for recognizing its applications to games like chess. Minimax is an optimal strategy for deterministic two-player zero-sum games of perfect information.
Note
Deterministic means that there are no random events like dice that determine the state of the game. Zero-sum means that there is only one winner (such that both players’ final scores add up to zero). Perfect Information means that both players can see all the pieces in play (like chess or checkers), rather than keeping some information secret (like poker).
6.1.1 Example: Tic-Tac-Toe¶
The game of Tic-Tac-Toe (known as Naughts and Crosses in England) involves two players, designated by their respective marks, “X” and “O”. Each player takes turns placing their mark an empty spot within a 3x3 board. “X” typically goes first. The first player to have three marks in a row horizontally, vertically or diagonally wins. A draw occurs if there are no empty spaces an no player has won.
Tic-Tac-Toe is determinstic because there is no element of chance. It has perfect information because both players can see the board at all times. And it is zero-sum because if one player wins, the other loses. We can think of winning as awarding +1 point, and losing penalizing -1 points (and so the sum of both player’s scores will always be zero). Maximizing your score is therefore the same thing as minimizing your opponent’s score.
Here’s a board, let’s say you’re player X, where would you go to win?
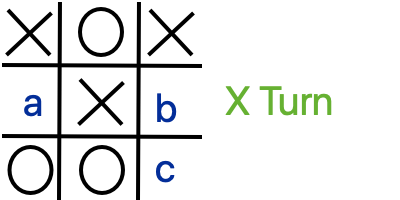
- a
- b
- c
- Right! The best move is the lower right corner, creating 3 in a row!
5.4-1: Which square should X play in to win?
Here’s another board - where should you move to maximize your score?
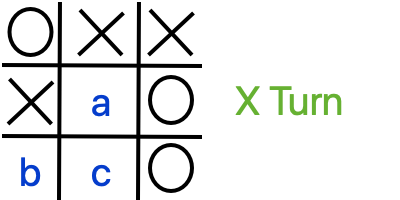
- a
- That's right - you can't win, but if you play in the middle square you can at least keep your opponent from winning - so forcing a draw maximizes your score.
- b
- c
5.4-2: Which square should X play to maximize their score?
6.1.2 Minimax Tree Search¶
Now let’s introduce the minimax strategy using Tic-Tac-Toe. The basic idea is to always make the move that maximizes your score (or minimizes your opponent’s score). But how do you know, at your very first move, which move will maximize your score? You have to use depth-first-search to begin to explore the game tree (all possible moves in the game). Each distinct board in the tree is called a “Node”, and there are two types of nodes – when it is X’s turn to play (call these “maximizing nodes” because they are trying to maximize X’s score) and when it is O’s turn (call these “minimizing nodes” because they are trying to minimize X’s score. To simplify, let’s call player X “Max”, and player Y “Min”.
Let’s build this tree from the bottom up. During depth first search, once you reach a terminal node (a board resulting a win, lose or draw), you can replace that node wih the corresponding score (1, -1, or 0). When have explored and scored all of a non-terminal node’s subtrees, you just need to pick the maximum score of its children (if a maximizing node) or the minimum score (if a minimizing node). Once we’ve done this, our algorithm can “forget” the children.
Note
A terminal node is one at the bottom of the tree, like a leaf. a non-terminal node is one that has children. In the context of Tic-Tac-Toe, a winning, losing, or tied board is terminal, and all other boards are non-terminal because there are still moves that can be made.
Here for instance is a Max node, with two possible moves - one results in a win (+1), and the other in a draw (0). Naturally Max will want to make the winning move - so we can score this board as a +1.
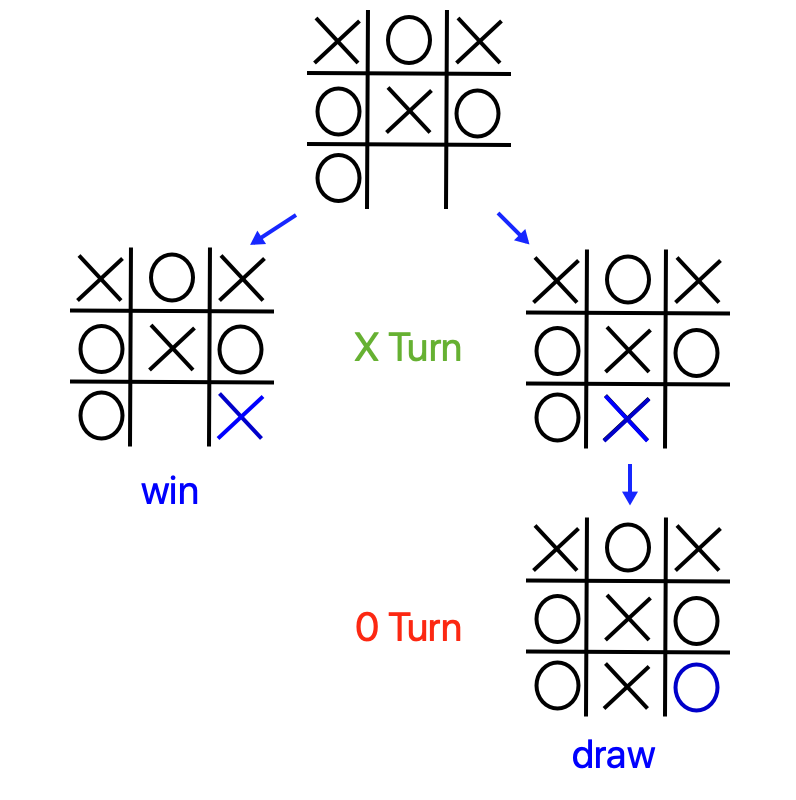
Here is the choice redrawn with the scores at the leaf nodes “percolated” up to the top.
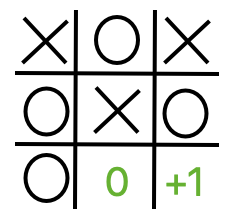
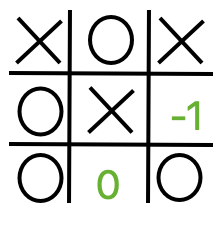
Here however is another Max node with two possible moves - one results in a loss (-1) and the other a draw. Seeking to maximize their score, Max will choose the move that produces a draw. So we can score this board as a 0.
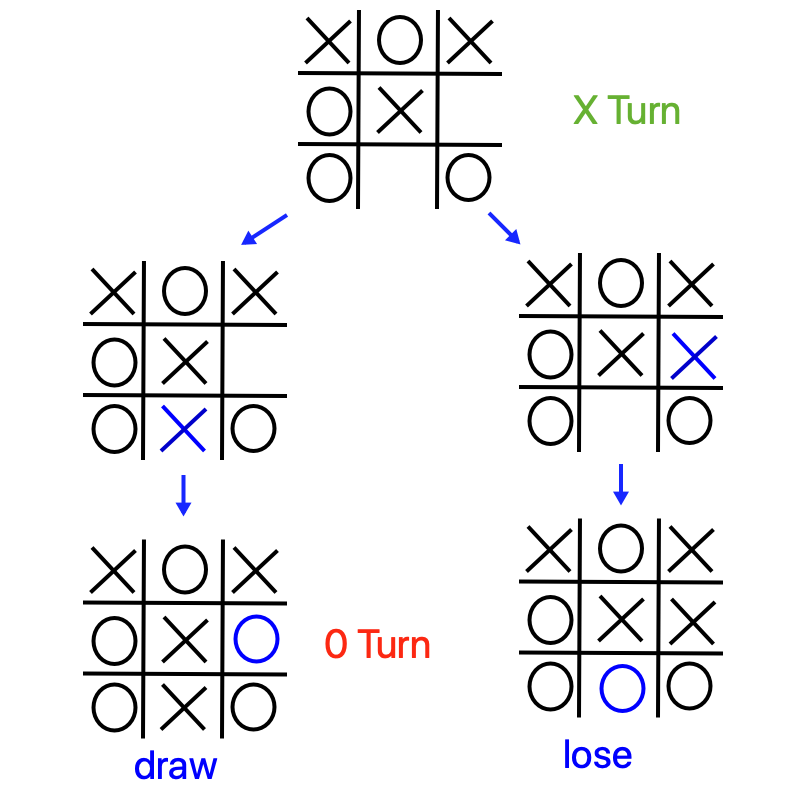
Again, here is the choice redrawn with the scores at the leaf nodes “percolated” up to the top.
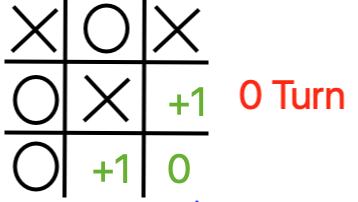
We can now move up to the previous board - which is a Min node. If Min has a choice between making a move that leads to a +1 node for Max and a move that leads to a 0 for Max, they’ll choose the 0, because that minimizes Max’s score.
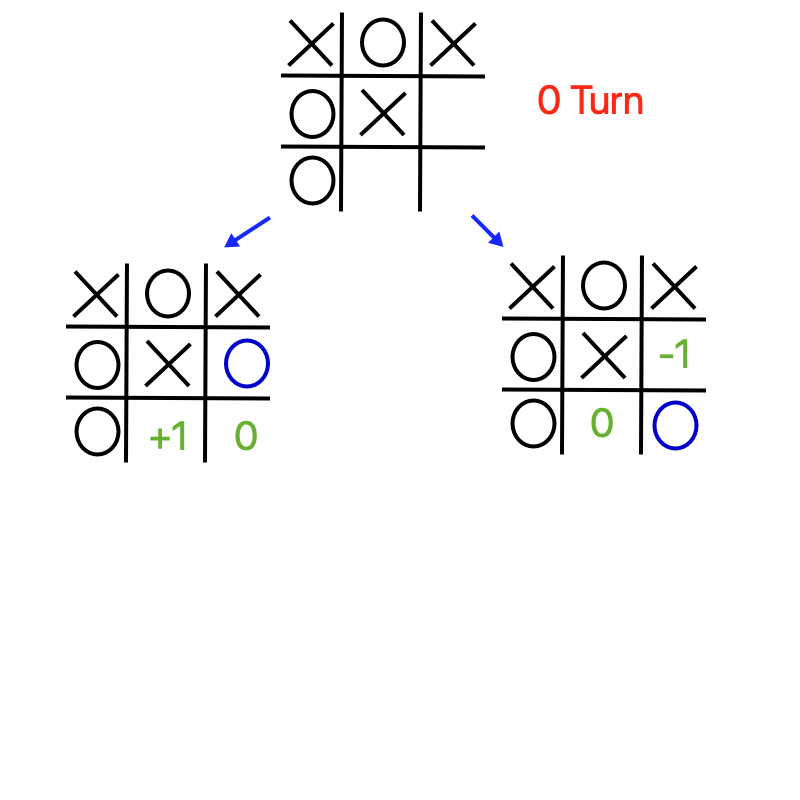
And again with the scores percolated up. Note that the maximizing node (Player X) will always pick the highest scoring move.
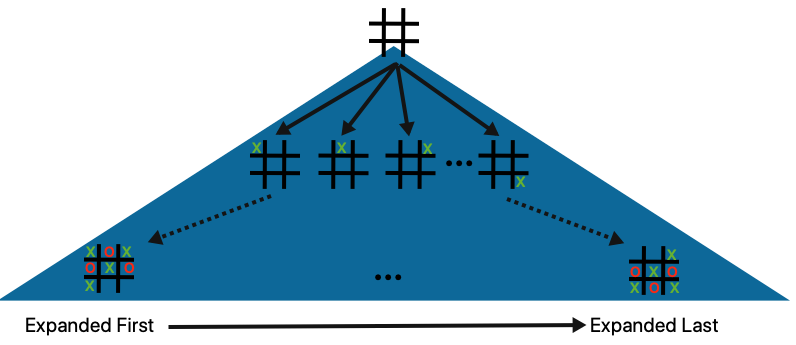
Finally here’s a look at how the whole game tree might be explored by a single depth-first process. Presuming we expand moves from the left to the right from any given board, we’ll also be exploring child nodes from the left to the right.
6.1.3 Minimax with Serial Depth First Search¶
Now that we have the basic mechanics, we can explain the how to search the whole game tree, starting at a given move, to pick the optimal move. This tree search is particularly amenable to recursive depth first search, because once we score a terminal node, and pass its value to the parent, we can forget about it.
The pseudocode for this algorithm (technically called Negamax) is as follows:
//assume max is player 1
//and min is player -1
int Minimax(node,player)
if (node is terminal):
return player*score(node)
else
score <- -inf
for each child of node:
childscore<- -1*Minimax(child,-1*player)
score <- max(score,childscore)
return score
6.1.4 Parallelizing Depth-First Search¶
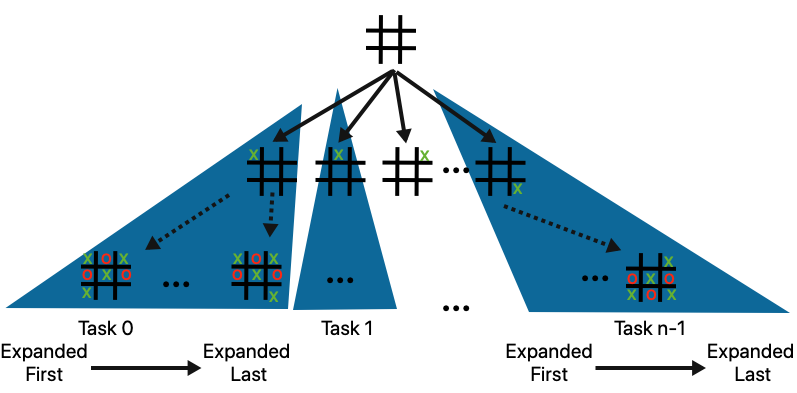
A parallel implementation is now fairly straightforward: when it is the computer’s turn we use a parallelized for loop to distribute subtrees generated by legal moves across tasks, and then each thread then performs its own recursive minimax on its respective subtrees. Each task needs its own private copy of the board. The score and bestmove variables are shared, however, and so when each thread updates these it has to do so in a critical section.
A diagram is shown below:
And psuedocode:
void ParallelDFS(board)
bestmove <- -1;
score <- -2;
//distribute legal move subtrees across tasks
parallel for every legal move
newboard <- make_move(board,move)
//have each task do DFS on its subtree
tempScore <- minimax(newboard)
if(tempScore > bestscore)
//assuming these variables are shared
bestscore <- tempScore
bestmove = move
6.1.5 Programming Implementations¶
We’ll now explore the code implementations for the serial and parallel approaches.
In both cases, the central recursive minmax function that is run for a starting legal board move configuration down to its leaves is as follows:
//minimax in a single recursive function
// you call max if it is your move
// and min if it is your opponent's move.
int minimax(int * board, int player) {
//How is the position like for player (their turn) on board?
int winner = win(board); //is the board a win?
if(winner != 0) return winner*player; //base case
int curbestmove = -1; //the best move possible
int curbestscore = -2;//Losing moves are preferred to no move
int i;
for(i = 0; i < BOARDSIZE; ++i) {//For all moves,
if(board[i] == 0) {//If legal,
board[i] = player;//Try the move
// draw(board); // debug
int thisScore = -1 * minimax(board, player*-1);
if(thisScore > curbestscore) {
curbestscore = thisScore;
curbestmove = i;
}//Pick the one that's worst for the opponent
board[i] = 0;//Reset board after try
}
}
if(curbestmove == -1) return 0;
return curbestscore;
}
The board is a 1x9 array of integers whose values correspond to player pieces (0 is empty). The for loop iterates through all possible legal moves, keeping track of the best move it has found along the way. By using the value 1 to correspond to the maximizing player, and -1 to correspond to the minimizing player allows us to negate scores when passed from a min node to a max node (and vice versa).
Serial Implementation¶
Here’s how we would implement the play that the computer does to calculate its best move from all the subtrees:
void computerMove(int * board) {
int move = -1;
int score = -2;
int i;
// This loop is the easiest part to parallelize
for(i = 0; i < BOARDSIZE; ++i) {
if(board[i] == 0) {
board[i] = 1;
int tempScore = -minimax(board, -1);
board[i] = 0;
if(tempScore > score) {
score = tempScore;
move = i;
}
}
}
//returns a score based on minimax tree at a given node.
board[move] = 1;
}
OpenMP Implementation¶
In the OpenMP implementation we distribute subtrees of legal moves cyclicly across all threads. A complication of this is that we need to make a private copy of the 9x9 board for each thread. Dynamic scheduling allows the first idle thread to pick up the next legal move. We need a critical section at the point where the threads compare their current move against the global best move.
void computerMove(int * board, int nthreads) {
int bestmove = -1;
int score = -2;
int i;
//printf("computer move:\n");
//draw(board);
#pragma omp parallel num_threads(nthreads)
{
int *privateboard = malloc(9*sizeof(int));
memcpy((void *)privateboard,(void *)board,9*sizeof(int));
#pragma omp for schedule(dynamic,1)
for(i = 0; i < BOARDSIZE; ++i) {
if(privateboard[i] == 0) {
privateboard[i] = 1;
int tempScore = -minimax(privateboard, -1);
privateboard[i] = 0;
//critical to protect shared variables
#pragma omp critical
if(tempScore > score) {
score = tempScore;
bestmove = i;
}
}
}
}
//returns a score based on minimax tree at a given node.
board[bestmove] = 1;
}
MPI Implementation¶
An MPI implementation is very similar, although like all distributed memory applications we don’t need to worry about shared variables or critical sections.
Specifically, to calculate the computer’s next move we broadcast the current state of the board to all worker nodes. If there are p nodes, then each node uses a for loop to iterate through every pth legal move, and calls minimax on the corresponding subtree.
void computerMove(int * board, int rank, int p) {
int move = -1;
int score = -2;
MPI_Bcast(board,BOARDSIZE,MPI_INT,0,MPI_COMM_WORLD);
for(int i = rank; i < BOARDSIZE; i += p) {
if(board[i] == 0) {
board[i] = 1;
int tempScore = -minimax(board, -1);
board[i] = 0;
if(tempScore > score) {
score = tempScore;
move = i;
}
}
}
int local_best[2] = {score, move};
int global_best[2];
MPI_Reduce(local_best,global_best,1,MPI_2INT,MPI_MAXLOC,0,MPI_COMM_WORLD);
if (rank == 0) {
board[global_best[1]] = 1;
}
}
Exercise for a challenge
If you’d like a challenge, develop a complete MPI version from the above hint for what the
computerMovefunction would be like.
6.1.6 Further exploration¶
Download the code files from the links below or from a GitHub repo for the CSInParallel Project. The code is inside a folder called BeginnerCommonApplications/minimax.
To see this code in action, you will need to get your own copy and run it on a terminal, because in the game you play the computer, seeing each new move that counters yours.